雷达传感器常常被直观地与光学系统相比较。相机生成的图像是人类从小就学会解读的:带有颜色、材质和形状信息的可见表面的二维呈现。然而,雷达基于完全不同于相机的物理原理。这种差异常常导致人们对雷达提供的信息类型以及输出结果的表现形式产生误解。
本文阐述了雷达传感与相机传感之间的根本差异,并说明了为何雷达呈现的图像不应像相机拍摄的图像那样被解读。
雷达不会生成光学意义上的图像。它测量的是电磁波反射的物理特性,并以抽象形式呈现这些测量结果。要正确解读雷达数据,关键在于理解雷达实际测量了什么,以及它没有测量什么。
雷达的“看见”意味着什么?
雷达既不测量亮度也不感知色彩。它通过评估反射的射频信号,得出以下物理量:
• 距离,通过信号传播时间或差频推导得出
• 相对速度,通过多普勒频移推导得出
• 方向,通过多个天线之间的相位差推导得出
• 信号强度,代表反射能量的多少
接收到的信号最初存在于时域或频域中。只有通过信号处理步骤,例如FFT、滤波和检测算法,才能生成距离剖面图、热力图或点云图等形式。这些表现是对测量数据的可视化呈现,而非物体表面的图像。
在现代FMCW雷达系统中,这些物理量并非独立测量。它们共同构成了一个多维测量空间,通常被称为雷达立方,涵盖距离、速度和角度。该立方中的每个单元都代表特定维度组合下测量到的信号能量。许多常见的雷达可视化图像,如距离-多普勒图或距离-角度图,都是对这个高维测量空间的二维切片或投影。
当将光学图像与雷达测量数据进行对比时,这种差异尤为明显:相机用二维图像呈现物体表面,而雷达数据则存在于一个多维空间中,必须通过投影和处理才能解读。

相机拍摄到的场景图片
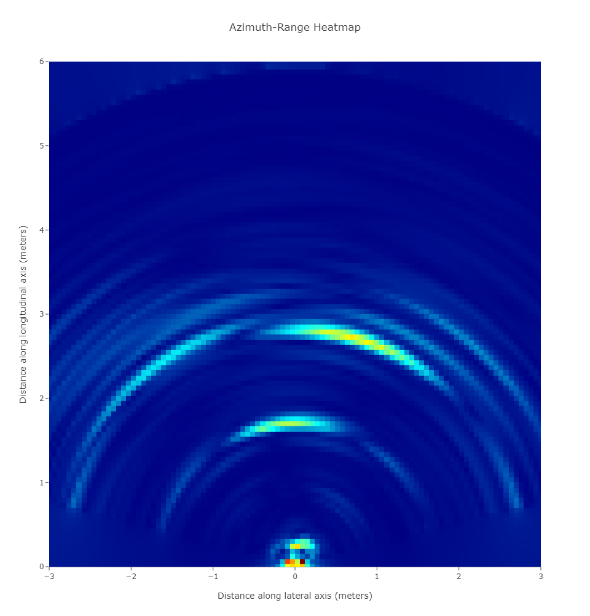
雷达测量的同一场景的距离-方位角热力图
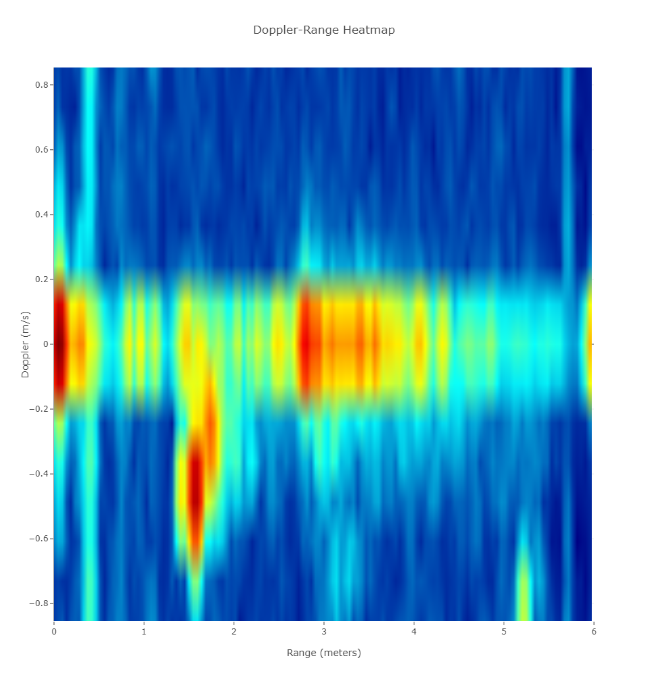
雷达测量的同一场景的距离-多普勒热力图
相机在二维图像中呈现物体可见表面,而雷达图则展示了信号能量在距离、速度和角度上的分布情况。雷达数据反映的是测量区域,而非物体的外观。
为什么雷达不像相机那样“看”物体
雷达与相机传感技术的核心区别不在于分辨率或坐标系,而在于与环境的物理交互方式。
雷达不能捕获物体表面信息
相机捕捉的是物体表面反射的光线。每个像素都对应特定方向上的一个表面单元。只要一个物体表面可见且有光照,它就会出现在图像中。
相比之下,雷达主要对电磁波的散射现象做出响应。它并非连续地对物体表面进行采样。相反,接收到的信号主要由少数强烈的散射机制主导。在实际应用中,显著的雷达反射通常源自:
• 边缘和拐角(几何不连续处)
• 金属或导电结构
• 材料或几何形状的突变
• 取决于物体朝向的镜面反射
这导致了以下几个效应经常被误解:
大体积物体可能仅表现为少数几个反射点
即使一个物体完全处于雷达视野内,测量到的信号能量也可能仅由少数几个散射中心主导。物体的大部分区域可能几乎不产生或仅产生微弱的雷达回波。
没有反射并不代表没有物体
大型、光滑或均匀的表面可能会将射频能量反射至远离传感器的方向。根据其朝向和材质,这类表面即便肉眼可以看到明显存在,也可能无法产生明显的雷达响应,表现为信号微弱、不稳定或完全无响应。
物体朝向对雷达响应有显著影响
视角的微小变化可能导致主导散射机制发生显著改变。因此,即便物体本身保持静止,其雷达反射特征也可能发生变化。
雷达测量的是交互作用,而非物体外观
信号强度表示的是场景中各部分将电磁能量反射回传感器的强度。它并不直接与物体的大小、形状或视觉突出程度相关。
因此,雷达所描绘的并非是物体表面,而是那些起主导作用的散射中心。这些散射中心的可见度会受到几何形状、材料特性和观察角度的影响。
相位与多径效应
雷达信号包含相位信息。位置或方向上的微小变化可能会导致相长或相消的干涉现象,从而导致反射信号出现、消失或幅度发生显著变化。
此外,由于地面或周围结构的反射作用,雷达波通常会通过多条路径到达接收器。这些多路径效应会产生一些与直接路径反射不同的额外响应。
从光学角度看似乎是伪影的现象,在雷达探测中却是意料之中的物理效应。
雷达图不是图片
雷达热力图和点云图不应该像基于像素的图像那样解读。每个显示的点或颜色值都代表距离、速度或角度上的一个测量单元。这些测量单元:
• 具有有限的空间分辨率
• 可能包含来自多个物理位置的能量
• 是信号处理链的结果
因此,雷达图只是对测量数据的解读,并非对现实场景的直接描绘。
如何解读雷达数据
雷达回答的问题与相机不同。雷达通常解答的问题是:
• 在特定距离上是否存在物体?
• 它是否在移动,速度是多少?
• 反射信号随时间的稳定性如何?
雷达擅长测量距离、运动和动态,且不受光照条件或能见度的影响。期望雷达输出类似于相机图像,往往会导致错误解读。
相机与雷达——关键差异一览表
|
要素 |
相机 |
雷达 |
|
检测内容 |
光照强度和颜色 |
距离、相对速度和角度 |
|
数据表现内容 |
物体可见表面 |
主要散射中心 |
|
空间表示形式 |
二维图像 |
测量空间(范围/速度/角度) |
|
运动信息 |
需要观察信号随时间变化来预测 |
通过多普勒原理直接测量 |
|
常见难题 |
弱光,强光,雾 |
多路径反射,反射很依赖朝向 |
结论
雷达并非试图复制光学视觉。它通过电磁相互作用来测量距离、运动、方向和散射强度,并将这些测量结果以抽象的形式呈现出来。
雷达图像与相机图像看起来并不相同这一事实并非是缺点,而是雷达所传递的物理信息与相机所传递的物理信息存在差异所导致的直接结果。
理解雷达所测量的内容以及这些测量结果是如何呈现的,是有效使用雷达的关键。
雷达不能展示物体的外观,而是揭示它们的位置和运动方式。


